

西门子模块6ES7212-1BB23-0XB8规格说明
闭环控制系统是采用直线型位置检测装置(直线感应同步器、长光栅等)对工作台位移进行直接测量并进行反馈控制的位置伺服系统,其控制原理见图1所示。这种系统有位置检测反馈电路,有时还加上速度反馈电路。

图1闭环伺服驱动系统

图2 永磁式同步

图3 交流内部结构
1. 交流同步伺服电机的种类
励磁式、永磁式、磁阻式和磁滞式
2. 永磁交流同步伺服电机的结构
电机由定子、转子和检测元件组成。见图2所示。其内部结构见图3所示。
3.永磁交流同步伺服电机工作原理和性能
当三相定子绕组通入三相交流电后,在定子、转子之间产生一个同步的旋转磁场,设转子为磁铁,在磁力作用下,使转子跟随旋转磁场同步转动。
只要负载不超过一定限度,就不会出现交流失步现象,这个负载大极限称为大同步扭矩。
用减少转子惯量,或让电动机先低速再提高到所要求的速度等方法,解决同步电机启动困难的问题。
主要参数:额定功率、额定扭矩、额定转速等。
交流伺服电机的优点:
◆ 动态响应好;
◆ 输出功率大、电压和转速提高。
4. 永磁交流同步伺服电机的调速方法
进给系统常使用交流同步电机,该电机没有转差率,电机转速为
调速方法:变频调速
5. 交流进给伺服电机的速度控制系统
系统组成:速度环、电流环 、spwn电路、功放电路、检测反馈电路。见图4所示。

图4 交流伺服电机速度控制系统组成框图
开环控制见图1所示
特点:结构简单,步进驱动、,无位置速度反馈。

图1 开环控制伺服驱动系统
1. 结构
电机的定子和转子铁心通常由硅钢片叠成。定子和转子均匀分布着很多小齿。定子上有a、b、c三对磁极,在相对应的磁极上绕有a、b、c三向控制绕组。其几何轴线依次分别与转子齿轴线错开。见图2-5-6所示。
2. 工作原理
步进是一种把电脉冲转换成角位移的电动机。用专用的驱动向步进电动机供给一系列的且有一定规律的电脉冲信号,每输入一个电脉冲,步进电机就前进一步,其角位移与脉冲数成正比,电机转速与脉冲频率成正比,而且转速和转向与各相绕组的通电方式有关。
3. 步进电机的通电方式
其运行方式有:三相单三拍、三相双三拍和三相六拍。
每输入一个脉冲信号步进电动机所转过的角度称为步距角,以θs表示。
步距误差是指步进电机运行时,转子每一步实际转过的角度与理论步距角之差值。
4. 步进电机功率驱动
驱动控制电路由环形分配器和功率放大器组成。
1)环形分配器
环形分配器是用于控制步进电机的通电方式的,其作用是将数控装置送来的一系列指令脉冲按照一定的顺序和分配方式加到功率放大器上,控制各相绕组的通电、断电。环形分配器功能可由硬件或软件产生。见图2、3所示。

图2 三相硬件环形分配器的驱动控制

图3 三相软件环形分配器的驱控制
2)驱动放大电路
图4是一种高低压驱动线路。
特点:
高压充电,低压维持。
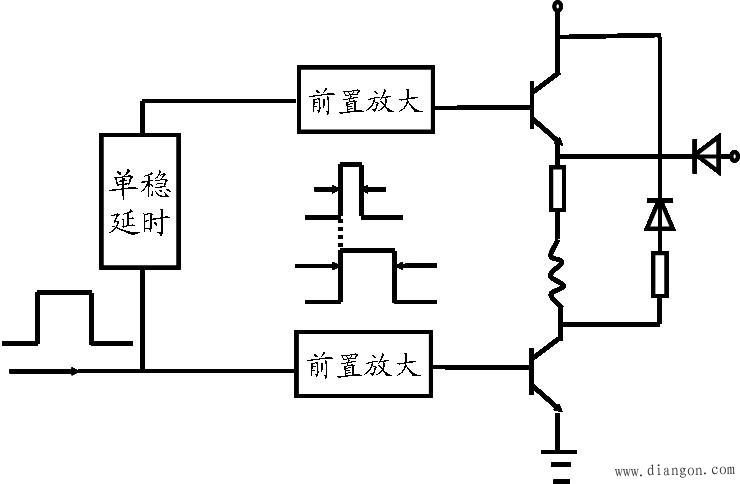
图4 高低压驱动原理
5. 主要特征
1)大静转矩tmax
2)启动频率
3)连续运行频率
4)矩频特性
5)静态步矩误差
6. 步进电机的选择
步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型号便确定下来了。
伺服系统是的重要组成部分,是连接数控装置(计算机)和机床之间的关键桥梁,伺服系统的性能在很大程度上决定了数控机床的性能,如数控机床的定位精度、跟踪精度、高移动速度等重要指标。建议我们先来学习一些基础概念,再学习各种进给伺服系统的控制方式。深刻理解掌握这部分知识,会对更好的学习后面的数控加工工艺有一定的帮助。
1、进给伺服系统
1)组成
进给伺服系统是以机床移动部件(如工作台)的位置和速度作为控制量的自动控制系统,通常由伺服驱动装置、、机械传动机构及执行部件组成。 见图1所示。
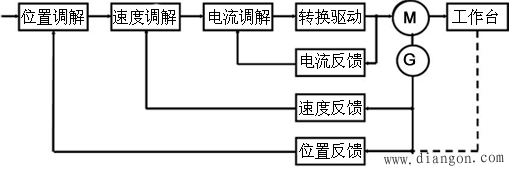
图1 伺服系统的组成
2) 作用
接受数控装置发出的进给速度和位移指令信号,由伺服驱动装置作一定的转换和放大后,经伺服电机(直流、交流伺服电机、功率等)和机械传动机构,驱动机床的工作台等执行部件实现工作进给或快速运动。
3) 基本技术要求
1)精度高
2)稳定性好
3)快速响应
4)调速范围宽
4) 分类
☆步进电机驱动系统
☆直流伺服驱动系统:永磁直流伺服
☆交流伺服驱动系统:永磁交流伺服电动机
2、开环控制伺服系统
开环进给伺服系统是数控机床中简单的伺服系统,执行元件一般为步进电机,其控制原理如图2所示。

图2 开环控制数控机床

图3 半闭环控制数控机床
3、半闭环控制伺服系统
采用旋转型角度测量元件(脉冲编码器、旋转变压器、圆感应同步器等)和直流伺服电动机按照反馈控制原理构成的位置伺服系统,其控制原理见图33所示。
4、闭环控制伺服系统
其控制原理见图4。
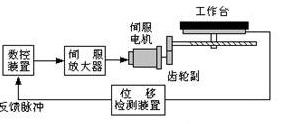
图4 闭环控制数控机床
进给伺服系统是数控系统主要的子系统。如果说cnc装置是数控系统的“大脑”,是发布“命令”的“指挥所”,那么进给伺服系统则是数控系统的“四肢”,是一种“执行机构”。它忠实地执行由cnc装置发来的运动命令,jingque控制执行部件的运动方向,进给速度与位移量。